Achtung, diese Beschreibung bezieht sich auf OpenPlotter 1. Seit kurzem ist OpenPlotter2 kostenlos erhältlich. OP2 ist wesentlich bedienerfreundlicher und hat mehr Funktionen. Da die Dokumentation sehr umfangreich ist, habe ich keine Tutorials für OpenPlotter2 erstellt. Wenn es Bedarf gibt hole ich das jedoch gerne nach, schreib mir einfach.
Die Dateien und die Dokumentation von OpenPlotter 2 gibt es bei sailoog.com
Das ist einer der Teile, auf den ich mich am meisten gefreut habe. Klar Kompass ist wichtig, hier bekommen wir den magnetischen Kurs (HDG), aber ich persönlich finde Roll und Pitch also die Neigung des Bootes zur Seite sowie nach vorne/hinten sehr interessant – nicht notwendig, auch nicht wichtig aber eben interessant.
Wie in OP007 – GPS Empfang haben wir auch wieder die Möglichkeiten Kompass und Neigung über drei Wege ins System zu bekommen. Elektronischen Kompass per NMEA, das Moitessier HAT oder worum es hier geht mithilfe eines IMU Sensors. IMU steht im englischen für „inertial measurement unit“ was man mit Lage-Messeinheit übersetzen kann und wird auch oft als Gyro bezeichnet. Nun genug geredet, legen wir los!
Benötigtes Material:
Notiz: Meiner Erfahrung nach muss OpenPlotter upgedated sein, ohne das aktuelle Update habe ich die Neigung nicht zum Laufen bekommen. Hier geht es zum Updaten von OpenPlotter.
Dieser Sensor gehört zur Gruppe der i2c Sensoren und muss mit vier Kabeln an dem Raspberry angeschlossen werden. + und – für die Stromversorgung sowie SDA und SCL für die Kommunikation.

Das gute an diesem Bus ist, dass einfach weitere i2c Sensoren parallel hinzugefügt werden können, aber das kommt dann im nächsten Schritt.
- Schritt 1: Der Anschluss

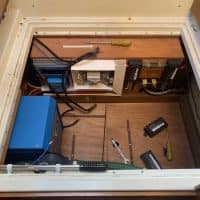
Verbinde den Pin 1 am Raspberry mit Ucc am Sensor und Pin 14 mit GND. Das ist schon mal die Stromversorgung. Für die Kommunikation schließen wir nun Pin 3 an SDA und Pin 5 an SCL an. Das warˋs auch schon. Wenn später mal alles funktioniert und du den Aufbau ins Boot bauen willst, würde ich eine Klemmleiste für +, -, SDA und SCL machen, an der man einfach alle i2c Sensoren anschließen kann. So sieht das jetzt schon mal im Versuchsaufbau aus:
Hier noch einmal der Anschluss:

Notiz: Solltest du das Moitessier-HAT verwenden, kannst du ein Breakout-board nutzen oder die Pins auf der Unterseite abgreifen.
Schritt 2: die Konfiguration
Zum Starten der Konfiguration öffnen wir OpenPlotter über das Ankersymbol und wechseln in den Reiter „pypilot“. Hier wird der IMU Sensor konfiguriert. Zuerst wählen wir oben den pypilot Mode „IMU only“ aus.
Zur Erklärung: Pypilot ist eine OpenSourse Software um selbst einen Autopiloten zu bauen. Dieser kann direkt über OpenPlotter angesteuert werden. Da wir darauf hier jetzt nicht eingehen, wählen wir IMU only.
Nun sollten wir schon zwei Sensoren angezeigt bekommen. IMU.heading für die Peilung und IMU pitch und roll für die Neigung. Beide aktivieren wir mit einem Haken bevor wir auf „Apply Changes“ klicken und die Einstellungen speichern.

3. Die Kalibration
Nun müssen wir die Neigung noch kalibrieren, das heißt der Software sagen, bei welcher Stellung der Sensor oder das Boot gerade steht. Dazu klicken wir auf “Calibration”
Nun sehen wir im “IMU” Reiter ein Boot, das sich neigt, wenn wir den Sensor neigen. Lege den Sensor nun gerade hin. (Später auf dem Boot sollten wir das im Hafen im Wasser ohne Wind und Welle wiederholen). Zum Starten der Kalibration klicken wir nun auf “Boat is level” und fassen nichts an, bis der Ladebalken durchgelaufen ist. Nun weiß OpenPlotter, wie das Boot gerade steht.
Der Kompass kalibriert sich selbst und hier muss nichts gemacht werden. Wenn der Sensor später in dein Boot eingebaut ist und das nicht gerade zur Bootslinie erfolgt ist, kannst du unten bei “Heading” noch den “Offset” einstellen. Das heißt zum Beispiel: wenn dein Boot nach 10 Grad zeigt und dein OpenPlotter 16 Grad sagt, kannst du hier -6 eingeben um das auszugleichen.

An dieser Stelle sind wir mit der eigentlichen Einstellung fertig. Hier noch ein Weg um die Sensordaten auszulesen
- Schritt 4
- : Anzeigen der Werte im openCPN Dashboard
Öffne zunächst openCPN vom Desktop und klicke auf Optionen

Navigiere zu „Plugin“ und suche nach dem „Dashboard“. Aktiviere dieses durch einen Klick auf „Enable“ und gehe danach über „Preferences“ in die Einstellungen“.

Wähle links in der Leiste dein farbiges Dashbord aus und füge diesem über „Add“ die Messwerte „Mag HDG”, “Pitch” und “Heel” hinzu. Danach sollte dein Bildschirm so aussehen:

Bestätige das nun mit „OK“. Wenn du jetzt in openCPN das Dashbord öffnest (bei mir in der Werkeugleiste das zweite von rechts) kannst du die aktuellen Werte für Peilung und die Neigung des Bootes sehen.

Übrigens kannst du hier auch mehrere Dashbords anlegen oder andere Werte hinzufügen. In OP0009 – Temperatur und Luftdruck fügen wir zum Beispiel atmosphärische Messungen hinzu.